Indeks:
1-Pengenalan
2-Sebelum mulai
3-Bagian daftar
4-Hello Hardware!
5-Merakit proses
5.1-Mobil pertama
5.2-Mobil kedua
5.3-Servo dan roda depan
5.4-Baterai
5.5-Sirkuit
5.6-Servo
5.7-LDR
6-Program!
—————————————————
1-Pengenalan
Dalam
tutorial ini Anda akan melihat bahwa Anda don´t harus guru elektronik,
atau programmer super terampil untuk membuat robot yang sederhana, mudah
dan lucu.
Itu won´t memiliki sensor IR apapun atau ultrasonik.
Jadi apa yang akan robot ini melakukan... Anda mungkin bertanya.
Ini akan menjadi gila cahaya pencari!!
Jika
Anda memutuskan untuk mengikuti tutorial ini, setidaknya Anda harus
dapat menggunakan papan tempat memotong roti, dan jika mungkin sedikit
solder, dan sedikit panas lem.
————————————————–
2-Sebelum mulai
————-
Apakah Anda pernah menggunakan satu BREADBOARD?
Di sini Anda memiliki tutorial bagus dan penjelasan pada cara kerjanya:
http://letsmakerobots.com/node/596
————-
Di bagian 4 aku akan menunjukkan Anda bagaimana membaca masukan analog dan bagaimana membuat satu servo bergerak tapi...
Jika Anda don´t tahu:
-cara blink LED;
-membaca potenciomenter analog input;
-Gunakan perintah Serial;
-memahami dasar-dasar OOP (Object Oriented Program).
Saya menyarankan Anda untuk mengunjungi link ini:
Memulai dengan Arduino
Berikut adalah nice set Tutorial:
http://ITP.NYU.edu/physcomp/Tutorials/Tutorials
http://todbot.com/blog/bionicarduino/
http://todbot.com/blog/spookyarduino/
CATATAN:
Selalu mengambil satu langkah pada satu waktu. Setiap kali Anda mengumpulkan sesuatu menguji, dan jika Anda berhasil, lanjutkan ke langkah berikutnya.
Ini adalah praktik yang baik, dan itu akan membuat Anda menghemat waktu berharga dan kesabaran.
—————————————————
3-Bagian daftar:
Generik bagian:
1 Arduino Diemicila
1 Breadboard
1 Servo
2 LDR (cahaya tergantung perlawanan)
2 10 k resistor
2 / Switchs
5-1 Ohm resistor (ini akan tergantung pada Anda motor listrik)
Prototipe kabel (berwarna jika mungkin)
Bagian disesuaikan:
Baterai-itu tergantung pada kebutuhan motors
Saya akan menggunakan:
1 9V baterai dengan kekuatan pasang untuk terhubung ke Arduino
3 AA NiMh kekuasaan motor
————
Saya memilih untuk menggunakan mainan bukan premade bagian. Itu lebih cepat untuk mendapatkan mereka dan mereka juga murah, dan menyenangkan untuk bekerja dengan. Selain itu, ini meningkatkan criativity Anda dan Anda mendapatkan dulu finder solusi.
————
Dalam 1 Euro toko, atau toko Cina, Anda dapat menemukan banyak mainan murah, menunggu untuk dapat menjarah! : )

Satu ini 5€ dan saya akan menggunakan chassis sebagai platform

Mobil kecil ini adalah € 2 dan saya akan menggunakan roda depan nya untuk kemudi.
——————————————————–
4-Halo perangkat keras:
LDR-resistor tergantung ringan
Bagian
ini adalah untuk pemula di Arduino, saya akan menunjukkan secara
singkat bagaimana untuk menggerakkan servo, dan membaca masukan analog
melalui LDR´s.
———–
Membaca LDR analog input:
LDR dapat ditempatkan dengan cara baik dan begitu juga resistor. Ini berarti mereka don´t memiliki + atau.


Mengambil satu kawat dan terhubung ke satu Arduino Analog Pin pilihan Anda
LDR KODE
———–
Sekarang untuk Servo:
Sebelum Anda menggunakan kode servo, Anda harus menginstal Servotimer1 perpustakaan. Ekstrak ke folder hardware perpustakaan Anda untuk menambahkan perpustakaan. Kemudian restart Arduino perangkat lunak. Mengambil
kabel hitam yang berasal dari servo dan colokkan ke garis hitam pada
papan tempat memotong roti, merah kawat ke jalur merah pada papan tempat
memotong roti, dan kuning kawat ke Arduino pin 9. Mengambil
dua kabel lain dan menghubungkan 5V di Arduino ke jalur merah pada
papan tempat memotong roti dan GND di Arduino ke garis hitam pada papan
tempat memotong roti.
Arduino dapat didukung dari kabel USB.
KODE SERVO

Sekarang bahwa Anda lebih akrab dengan Arduino bit dan byte, Mari mulai menyenangkan: D
———————————————————
5-Merakit proses
5.1-Mobil pertama
Membongkar
mobil yang akan menyediakan platform untuk komponen dan juga sistem
traksi, dan menghapus semua bagian kecuali roda belakang dan motor.

Solder dua cabel pada motor pins.

Juga disolder satu kabel hitam ke Ground pin pada kasus baterai dan satu merah kawat untuk tombol power.
Ini adalah yang pertama dan terakhir kali Anda melihat menyolder dalam tutorial ini. :)
———–
5.2-Mobil kedua
Mobil kecil yang lain adalah menjarah, kali ini saya akan menggunakan roda depan untuk memiliki steerings.
———–
5.3-Servo dan roda depan:

Hal ini tidak bekerja sangat cantik lem yang aku tahu... Cobalah untuk pusat roda terbaik yang dapat Anda.
Selanjutnya, saya menggunakan lem panas untuk menempatkan servo di sasis.
PERHATIAN: Menyatakan bahwa kedua roda menyentuh tanah ketika berubah, jika tidak, Anda mungkin memiliki masalah.

Roda kiri tidak menyentuh tanah = masalah

Kedua roda menyentuh tanah = masalah terpecahkan:]
——–
5.4-Baterai
Saya cukup beruntung dengan mobil kecil ini. Baterai
9V sangat cocok di dalam chassis, dan dapat menggunakan baterai AA 3
kasus, dan menghemat ruang untuk meletakkan papan tempat memotong roti
di atas.


———–
5.5-Sirkuit
Arduino terhubung dari baterai 9V.
Kabel merah dan hitam menghubungkan 5V dan tanah dari Arduino baris utama breadboard.

Sekarang terhubung merah kawat dari falit AA ke dalam satu baris breadboard

Selanjutnya, saya akan menggunakan lima resistor´s dari 1 ohm antara motor dan falit AA 3.Ini adalah rendah nilai resistor, masing-masing dari resistor ini akan membuat motor pergi lebih lambat. Aku
bisa menggunakan resistor hanya satu dari 5 Ohm, tetapi menggunakan
lima dari 1 ohm, saya dapat memiliki kontrol yang lebih baik pada motor
listrik. Jika saya ingin kurang atau lebih motor listrik, saya akan menghapus atau menambahkan lain 1 ohm resistor. Dengan cara ini motor won´t terbakar dan itu masih punya kecepatan yang baik.


Catatan kawat tanah terhubung ke baris lain.

Dan cara ini menghubungkan kabel motor. Aktifkan kekuatan dan melihat jika itu bergerak maju dan jika memiliki daya yang cukup untuk mendorong robot Anda.
———–
5.6-Servo

Menghubungkan Servo breadboard.

Ambil dua kabel dan menghubungkan mereka ke breadboard utama row´s 5V dan tanah.
Ambil kabel lain dan menghubungkan kabel sinyal Servo ke Digital Pin 9 pada Arduino.
———–
5.7-LDR
Langkah terakhir:
Tempatkan LDR dan resistor, mereka memiliki don´t + atau -. Jadi Anda dapat menempatkan mereka dalam segala arah.


Hijau kabel untuk menghubungkan mereka ke Arduino Analog Input pin 4 dan 5.
——————
(tes LDR seperti yang Anda lakukan sebelumnya)

|
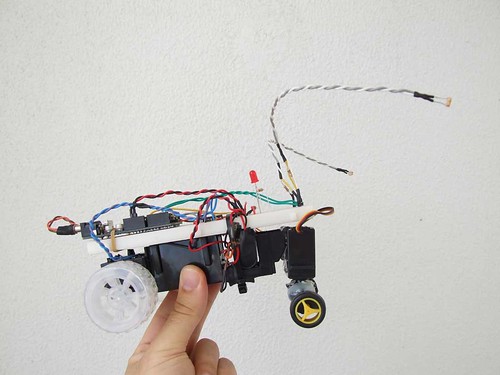
Ini adalah tampilan akhir dari sirkuit kami.
Setiap langkah fisik selesai! Jadi sekarang let´s upload beberapa kode ke Arduino.
———————————————————
6-Program!
Robot Program
| ||||||||

Saya telah membuat antena LDR lagi sehingga dapat menjadi lebih sensitif terhadap cahaya variasi.

———————————————————
Saya harap Anda menemukan tutorial ini berguna!! Dan saya berharap untuk melihat robot Arduino Anda diposting segera;)
5. Februari. 2009
hanya untuk mengatakan ada won´t akan ada bagian I, saya minta maaf untuk ini.
Saya
telah melakukan itu, tapi yang sedikit aneh, terlalu banyak kabel dan
koneksi hanya untuk mencapai tujuan ini... itu adalah niat yang baik
meskipun.
Maaf teman


SEMOGA BERHASIL
bahasanya ancur banget, copas dimana bro?
BalasHapusMas kebetulan saya mempunyai tugas kuliah membuat proposal robotika nih,, mhon dikasi penjelsan mengenai bentuk analisa dan perancangan dari tutorial di atas yang akan sy taruh di bab III nantinya,, trimakasih sebelumnya. . .
BalasHapusThx bro
BalasHapusmudah dimengerti artikelnya... mantab sob, thanks
BalasHapushttp://obatasliindonesia.com/pengobatan-liver-secara-tradisional/
Manteeep banget dah gan, nanti akan saya coba :)
BalasHapushttp://goo.gl/0NX6cN
maaf copas :)
BalasHapus